|
|
[LRDG90a]
Cornell University Program of Computer Graphics |
|
||||
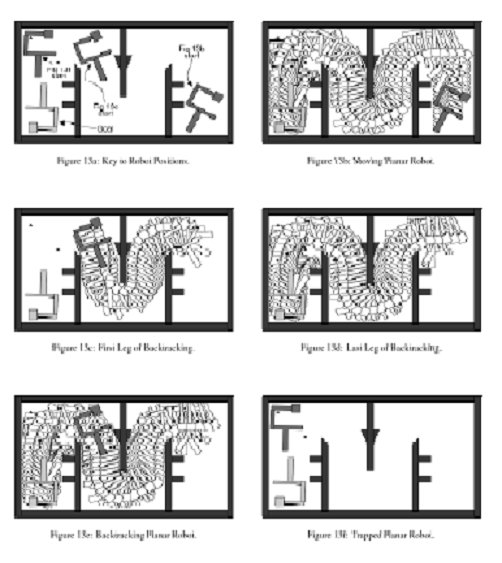
Real-time robot motion planning using rasterizing computer graphics hardware.Jed Lengyel, Mark Reichert, Bruce R. Donald, and Donald P. Greenberg.Computer Graphics (SIGGRAPH '90 Proceedings), 24(4):327--335, August 1990. We present a real-time robot motion planner that is fast and complete to a resolution. The technique is guaranteed to find a path if one exists at the resolution, and all paths returned are safe. The planner can handle any polyhedral geometry of robot and obstacles, including disjoint and highly concave unions of polyhedra. The planner uses standard graphics hardware to rasterize configuration space obstacles into a series of bitmap slices, and then uses dynamic programming to create a navigation function (a discrete vector-valued function) and to calculate paths in this rasterized space. The motion paths which the planner produces are minimal with respect to an (Manhattan) distance metric that includes rotation as well as translation. Several examples are shown illustrating the competence of the planner at generating planar rotational and translational plans for complex two and three dimensional robots. Dynamic motion sequences including complicated and non-obvious backtracking solutions, can be executed in real time.
This paper is available as a compressed Postscript file LRDG90a.ps.gz (129K).
| ||||||
| ||||||