|
|
[JP01]
Cornell University Program of Computer Graphics |
|
||||
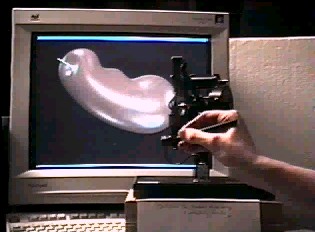
A unified treatment of elastostatic contact simulation for real time haptics, 2001.Doug L. James and Dinesh K. Pai.
We describe real-time, physically-based simulation algorithms for haptic interaction with elastic objects. Simulation of contact with elastic objects has been a challenge, due to the complexity of physically accurate simulation and the difficulty of constructing useful approximations suitable for real time interaction. We show that this challenge can be effectively solved for many applications. In particular global deformation of linear elastostatic objects can be efficiently solved with low run-time computational costs, using precomputed Green's functions and fast low-rank updates based on Capacitance Matrix Algorithms. The capacitance matrices constitute exact force response models, allowing contact forces to be computed much faster than global deformation behavior. Vertex pressure masks are introduced to support the convenient abstraction of localized scale-specific point-like contact with an elastic and/or rigid surface approximated by a polyhedral mesh. Finally, we present several examples using the CyberGlove and PHANToM haptic interfaces.
The accompanying videos are available as a QuickTime files: haptic.mov; gloveBig.mov; bananaSeat.mov. This paper is available as a PDF file JP01.pdf (1.5M).
| ||||||
| ||||||